

CNA lança pela terceira vez o prêmio “Logística | é feminino”
08/03/2024 às 19h58
OMV fortalece rede de camiões na Áustria e na Eslováquia
12/03/2024 às 16h58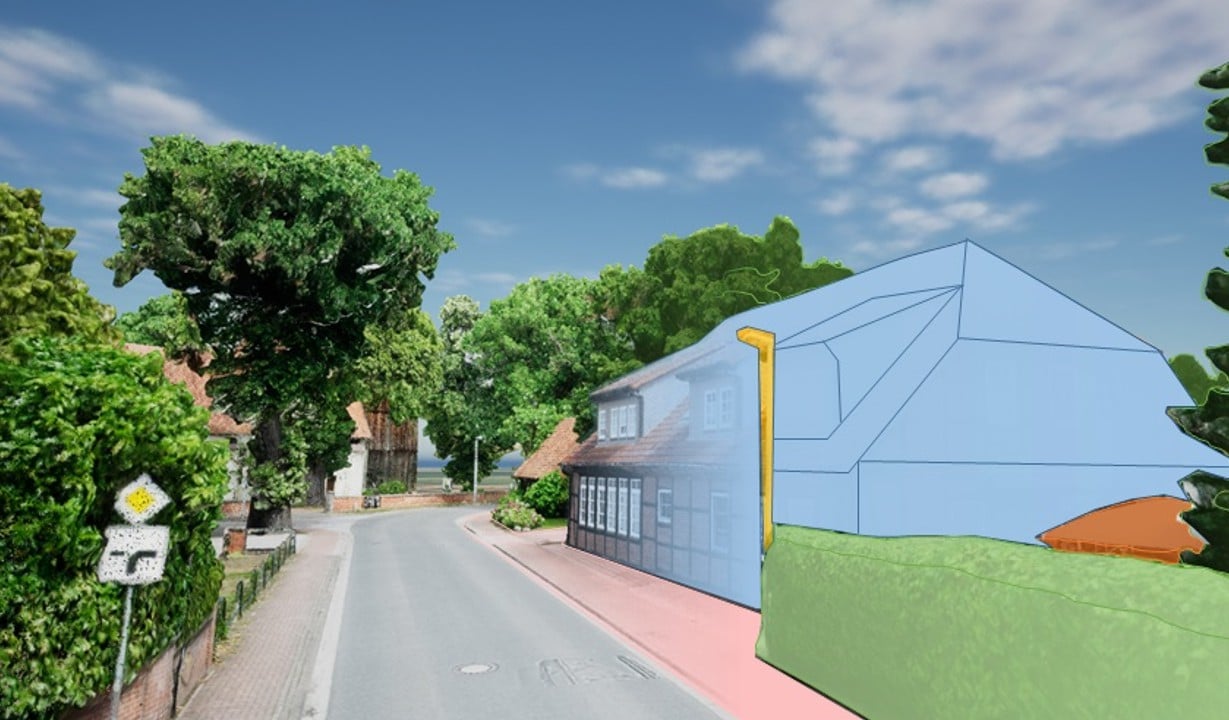
O transporte de gruas móveis para projetos de construção ou de lâminas de rotor para parques eólicos apresenta desafios para empresas e autoridades. Para garantir a transitabilidade de trechos críticos, como gargalos, frequentemente são utilizadas simulações por software. A TH Köln está investigando em um estudo de viabilidade como essa verificação pode ser realizada de forma mais simples e econômica em termos de tempo, entre outras coisas, com a ajuda da Inteligência Artificial.
(Köln) “Apenas o planejamento dos transportes é uma tarefa complexa. Para obter uma autorização especial, os requerentes devem considerar, entre outras coisas, a condição das estradas, pontes, túneis, curvas apertadas, inclinações, declives e vegetação obstrutiva. Para identificar todos os pontos críticos ao longo da rota, grandes volumes de dados precisam ser coletados, processados e visualizados. Vários projetos de pesquisa estão em andamento na universidade. Nosso objetivo é desenvolver e testar um método eficiente em termos de armazenamento e computação para a análise de transitabilidade”, relata o líder do projeto, Dr. René Degen, do CAD CAM Center Cologne da TH Köln.
Comparação de duas abordagens
No início do projeto, dois gargalos reais em uma rota de transporte serão medidos com dois métodos diferentes. No primeiro método a ser testado, os pesquisadores sobrevoam a rota de transporte com um drone. Os dados de imagem obtidos são processados por meio de fotogrametria em uma nuvem de pontos 3D, a fim de obter uma representação digital dos gargalos. “Cada imagem é marcada com um geotag que indica onde o drone está localizado. Na fotogrametria, um software analisa as fotos para identificar características ou pontos comuns. Comparando esses pontos entre as diferentes imagens, o software pode determinar a posição geográfica no espaço 3D”, explica Degen.
Como método comparativo, os pesquisadores da TH Köln estão desenvolvendo um sistema de mapeamento móvel que é fixado no teto de um veículo. Cada ponto de medição, capturado por um scanner a laser, recebe uma posição geográfica via satélite. Em seguida, os dados geográficos são reunidos em uma nuvem de pontos 3D. “Além disso, montamos uma câmera no sistema de medição e sobrepomos as imagens capturadas em nosso software à nuvem de pontos, que é então colorida de acordo com o ambiente. Assim, são criados mapas de modelo 3D que devem facilitar a verificação visual das imagens pelos usuários”, explica o líder do projeto.
Planejamento de rotas e verificação de colisões
Além dos dados ambientais, informações sobre a geometria do grande equipamento a ser transportado são inseridas em um algoritmo para treinar uma Inteligência Artificial. “O algoritmo tem a tarefa de encontrar uma rota com o menor risco de colisão possível. No caso de um gargalo, por exemplo, o contato da carga com arbustos ou vegetação é classificado como menos grave, enquanto o contato com uma ponte ou parede de uma casa é considerado um evento potencialmente grave. Em seguida, verificamos com qual base de dados dos dois métodos a análise pode ser realizada de forma mais confiável e simples”, diz Degen.
Para garantir a relevância prática do projeto, um grupo de trabalho de acompanhamento da pesquisa será formado com empresas, autoridades e associações. Através da troca contínua com os parceiros, deve-se garantir que o processamento de dados prototípico e a simulação da transitabilidade sejam aceitos por potenciais usuários, como empresas de transporte, projetistas e autoridades de licenciamento.
O estudo de viabilidade deve servir como base para pesquisas mais aprofundadas nesta área. Além disso, está planejado validar os resultados em um projeto subsequente e transferi-los para o desenvolvimento de um produto comercializável.
Sobre o projeto
O projeto “pointCloud2Model” está sendo realizado no CAD CAM Center Cologne da TH Köln, que é liderado pela Prof. Dr. rer. nat. Dr. h.c. Margot Ruschitzka. Dr. René Degen assume a liderança do projeto. O grupo de trabalho de acompanhamento da pesquisa inclui a Associação Federal de Transportes Pesados e Trabalhos com Gruas, a Agência de Mobilidade do Estado da Renânia-Palatinado, o fornecedor de sensores IGI mbH e a empresa de transporte BigMove AG. O projeto de um ano é financiado com 200.000 euros pela diretriz de financiamento “mFUND” do Ministério Federal de Digitalização e Transporte.
Foto: © CAD CAM Center Cologne



{kind=link}