

CNA roept voor de derde keer de prijs “Logistiek | is vrouwelijk” uit
08-03-2024 om 19:58
OMV versterkt netwerk voor vrachtwagens in Oostenrijk en Slowakije
12-03-2024 om 16:58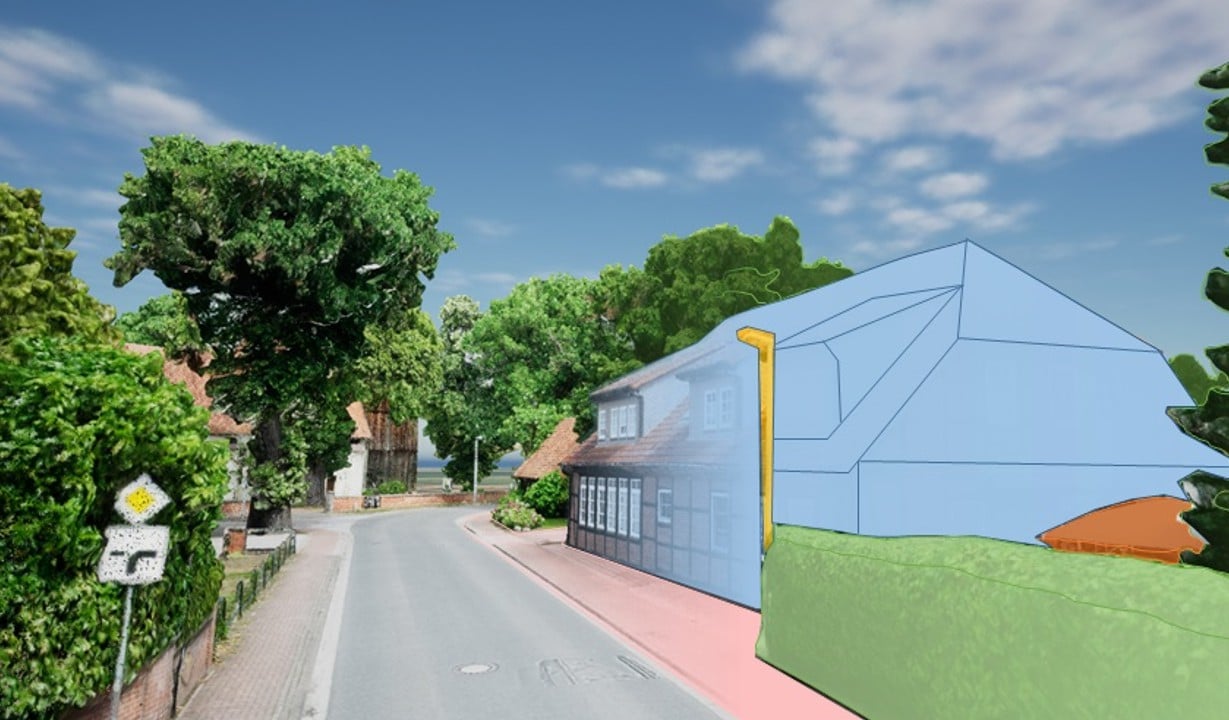
Het transport van mobiele kranen voor bouwprojecten of van rotorbladen voor windturbines stelt bedrijven en autoriteiten voor uitdagingen. Om de bevaarbaarheid van kritieke wegsegmenten zoals knelpunten te waarborgen, worden vaak simulaties via software ingezet. TH Köln onderzoekt in een haalbaarheidsstudie hoe deze controle onder andere met behulp van Kunstmatige Intelligentie eenvoudiger en tijdbesparender kan worden uitgevoerd.
(Köln) „Al de planning van de transporten is een complex karwei. Om een ontheffing te verkrijgen, moeten de aanvragers onder andere rekening houden met de staat van de wegen, bruggen, tunnels, scherpe bochten, hellingen, afdalingen en hinderlijke vegetatie. Om alle kritieke punten op de route te kunnen identificeren, moeten grote hoeveelheden gegevens worden verzameld, verwerkt en gevisualiseerd. Aan de hogeschool lopen verschillende onderzoeksprojecten. Ons doel is om een opslag- en rekenefficiënte methode voor de bevaarbaarheidsanalyse te ontwikkelen en te testen,” meldt projectleider Dr. René Degen van het CAD CAM Center Cologne van TH Köln.
Twee benaderingen vergelijken
Aan het begin van het project worden twee echte knelpunten op een transportroute gemeten met twee verschillende methoden. In de eerste te testen methode vliegen de onderzoekers de transportroute met een drone af. De verkregen beeldgegevens worden via fotogrammetrie omgezet in een 3D-puntwolk om een digitale afbeelding van de knelpunten te verkrijgen. „Elke afbeelding is voorzien van een geotag die aangeeft waar de drone zich bevindt. Bij de fotogrammetrie analyseert een software de foto’s om gemeenschappelijke kenmerken of punten te identificeren. Door deze punten over de verschillende afbeeldingen te vergelijken, kan de software de geografische positie in de 3D-ruimte bepalen,” legt Degen uit.
Als vergelijkende methode ontwikkelen de onderzoekers van TH Köln een mobiel mapping-systeem dat op het dak van een voertuig wordt bevestigd. Aan elk meetpunt, dat met een laserscanner wordt vastgelegd, wordt via satelliet een geografische positie toegewezen. Vervolgens worden de geodata samengevoegd tot een 3D-puntwolk. „Daarnaast monteren we een camera op het meetsysteem en leggen de daarmee gemaakte beelden in onze software over de puntwolk, die vervolgens overeenkomstig de omgeving wordt ingekleurd. Zo ontstaan 3D-modelkaarten die de gebruikers de visuele controle van de opnames moeten vergemakkelijken,” legt de projectleider uit.
Routeplanning en botsingscontrole
Naast de omgevingsgegevens worden informatie over de geometrie van het te transporteren grote apparaat in een algoritme ingevoerd om een Kunstmatige Intelligentie te trainen. „Het algoritme heeft de taak om een route met zo min mogelijk botsingsrisico te vinden. In het geval van een knelpunt wordt bijvoorbeeld de aanraking van de lading met struiken of hagen als minder ernstig beschouwd, terwijl contact met een brug of huiswand als een potentieel ernstig voorval wordt gezien. Vervolgens onderzoeken we met welke gegevensbasis van de twee methoden de analyse betrouwbaarder en eenvoudiger kan worden uitgevoerd,” aldus Degen.
Om de praktijkrelevantie in het project te waarborgen, wordt een onderzoeksbegeleidend werkgroep opgericht met bedrijven, autoriteiten en verenigingen. Door de continue uitwisseling met de partners moet worden gewaarborgd dat de prototype gegevensverwerking en simulatie van de bevaarbaarheid bij potentiële gebruikers zoals transportbedrijven, projectontwikkelaars, vergunningverlenende instanties en bij de vergunningverlenende instanties op acceptatie stuit.
De haalbaarheidsstudie moet de basis vormen voor diepgaandere onderzoeken op dit gebied. Daarnaast is het de bedoeling om de resultaten in een vervolgproject te valideren en in de ontwikkeling van een marktgericht product over te brengen.
Over het project
Het project „pointCloud2Model“ wordt uitgevoerd aan het CAD CAM Center Cologne van TH Köln, dat wordt geleid door Prof. Dr. rer. nat. Dr. h.c. Margot Ruschitzka. Dr. René Degen neemt de projectleiding op zich. De onderzoeksbegeleidend werkgroep bestaat uit de Bundesverband Schwertransporte und Kranarbeiten e.V., de Landesbetrieb Mobilität Rheinland-Pfalz, de sensorleverancier IGI mbH en het transportbedrijf BigMove AG. Het eenjarige project wordt gefinancierd via de subsidieregeling „mFUND“ van het Bundesministerium für Digitales und Verkehr met 200.000 euro.
Foto: © CAD CAM Center Cologne


{kind=link}
{kind=link}