

CNA indice per la terza volta il premio “Logistica | è femminile”
08/03/2024 alle 19:58
OMV rafforza la rete per camion in Austria e Slovacchia
12/03/2024 alle 16:58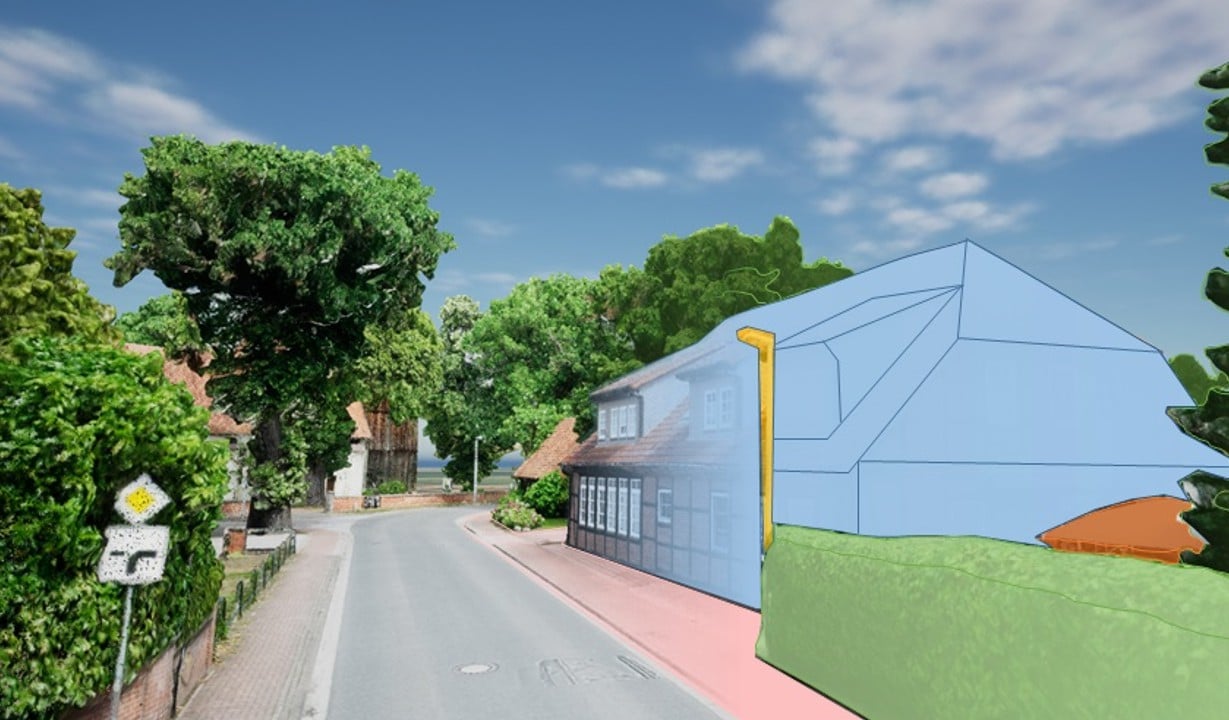
Il trasporto di gru mobili per progetti di costruzione o di pale eoliche per impianti di energia eolica presenta sfide per le aziende e le autorità. Per garantire la percorribilità di tratti critici come i restringimenti, spesso vengono utilizzate simulazioni software. La TH Köln sta conducendo uno studio di fattibilità su come questa verifica possa essere effettuata in modo più semplice e veloce anche grazie all’intelligenza artificiale.
(Köln) “La pianificazione dei trasporti è già di per sé un’impresa complessa. Per ottenere un permesso speciale, i richiedenti devono considerare, tra l’altro, le condizioni stradali, i ponti, i tunnel, le curve strette, le pendenze, le discese e la vegetazione ostacolante. Per poter identificare tutti i punti critici lungo il percorso, è necessario raccogliere, elaborare e visualizzare grandi quantità di dati. Presso l’università sono in corso diversi progetti di ricerca. Il nostro obiettivo è sviluppare e testare un metodo efficiente in termini di memoria e calcolo per l’analisi della percorribilità”, riferisce il responsabile del progetto, Dr. René Degen del CAD CAM Center Cologne della TH Köln.
Confronto di due approcci
All’inizio del progetto, due restringimenti reali su un percorso di trasporto vengono misurati con due metodi diversi. Nel primo metodo da testare, i ricercatori sorvolano il percorso di trasporto con un drone. I dati delle immagini ottenuti vengono elaborati tramite fotogrammetria in una nuvola di punti 3D, per ottenere un’immagine digitale dei restringimenti. “Ogni immagine è dotata di un geotag che indica dove si trova il drone. Nella fotogrammetria, un software analizza le foto per identificare caratteristiche o punti comuni. Confrontando questi punti tra le diverse immagini, il software può determinare la posizione geografica nello spazio 3D”, spiega Degen.
Come metodo comparativo, i ricercatori della TH Köln stanno sviluppando un sistema di mappatura mobile, che viene fissato sul tetto di un veicolo. A ciascun punto di misurazione, catturato con un laser scanner, viene assegnata una posizione geografica tramite satellite. Successivamente, i dati geodetici vengono uniti in una nuvola di punti 3D. “Inoltre, montiamo una telecamera sul sistema di misurazione e sovrapponiamo le immagini acquisite nel nostro software sulla nuvola di punti, che viene quindi colorata in base all’ambiente circostante. In questo modo si creano mappe modello 3D che dovrebbero facilitare la verifica visiva delle riprese per gli utenti”, spiega il responsabile del progetto.
Pianificazione del percorso e verifica delle collisioni
Oltre ai dati ambientali, le informazioni sulla geometria del grande dispositivo da trasportare vengono inserite in un algoritmo per addestrare un’intelligenza artificiale. “L’algoritmo ha il compito di trovare un percorso con il minor rischio di collisione possibile. In caso di un restringimento, ad esempio, il contatto del carico con arbusti o cespugli è considerato meno grave, mentre il contatto con un ponte o un muro di una casa è visto come un evento potenzialmente grave. Successivamente, verifichiamo con quale base di dati dei due metodi l’analisi può essere eseguita in modo più affidabile e semplice”, afferma Degen.
Per garantire il collegamento pratico nel progetto, viene costituito un gruppo di lavoro di accompagnamento della ricerca composto da aziende, autorità e associazioni. Attraverso uno scambio continuo con i partner, si intende garantire che l’elaborazione dei dati prototipali e la simulazione della percorribilità siano accolte positivamente da potenziali utenti come aziende di trasporto, progettisti, enti di autorizzazione e autorità di approvazione.
Lo studio di fattibilità dovrebbe costituire la base per ricerche più approfondite in questo campo. Inoltre, è previsto di convalidare i risultati in un progetto successivo e di trasferirli nello sviluppo di un prodotto commerciabile.
Informazioni sul progetto
Il progetto “pointCloud2Model” viene realizzato presso il CAD CAM Center Cologne della TH Köln, diretto dalla Prof.ssa Dr. rer. nat. Dr. h.c. Margot Ruschitzka. Dr. René Degen assume la direzione del progetto. Al gruppo di lavoro di accompagnamento della ricerca partecipano l’Associazione federale dei trasporti eccezionali e delle operazioni di gru e.V., l’ente regionale per la mobilità della Renania-Palatinato, il fornitore di sensori IGI mbH e l’azienda di trasporti BigMove AG. Il progetto di un anno è finanziato con 200.000 euro attraverso la direttiva di finanziamento “mFUND” del Ministero federale per la digitalizzazione e i trasporti.
Foto: © CAD CAM Center Cologne


{kind=link}