

CNA lance pour la troisième fois le prix « Logistique | est féminin »
08/03/2024 à 19 h 58
OMV renforce son réseau de camions en Autriche et en Slovaquie
12/03/2024 à 16 h 58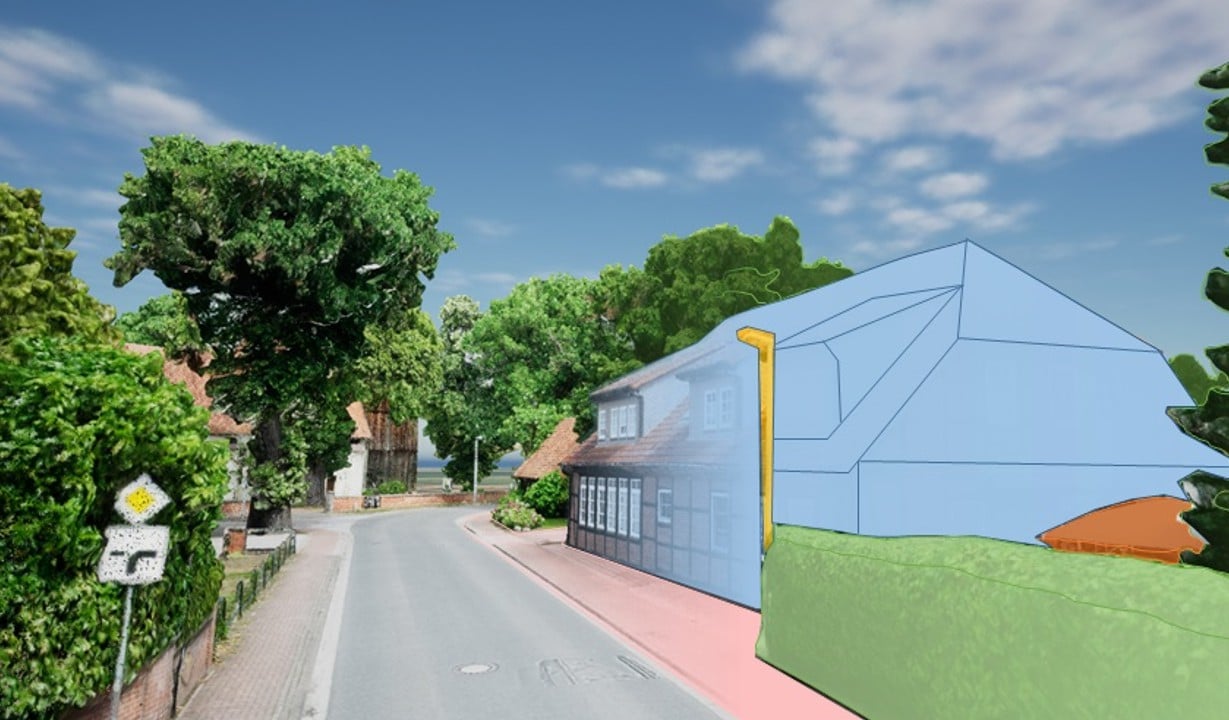
Le transport de grues mobiles pour des projets de construction ou de pales de rotor pour des éoliennes pose des défis aux entreprises et aux autorités. Afin d’assurer la praticabilité des sections de route critiques, telles que les goulets d’étranglement, des simulations par logiciel sont souvent utilisées. La TH Köln examine dans une étude de faisabilité comment cette vérification peut être réalisée plus facilement et de manière plus économique grâce à l’intelligence artificielle.
(Köln) « La planification des transports est déjà une entreprise complexe. Pour obtenir une autorisation exceptionnelle, les demandeurs doivent prendre en compte, entre autres, l’état des routes, les ponts, les tunnels, les virages serrés, les pentes, les dénivelés et la végétation gênante. Pour identifier tous les points critiques sur le parcours, de grandes quantités de données doivent être collectées, traitées et visualisées. Plusieurs projets de recherche sont en cours à l’université. Notre objectif est de développer et de tester une méthode efficace en termes de stockage et de calcul pour l’analyse de la praticabilité », rapporte le responsable du projet, le Dr René Degen du CAD CAM Center Cologne de la TH Köln.
Comparer deux approches
Au début du projet, deux goulets d’étranglement réels sur une route de transport seront mesurés à l’aide de deux méthodes différentes. Dans la première méthode à tester, les chercheurs survolent le parcours de transport avec un drone. Les données d’image obtenues sont traitées par photogrammétrie pour créer un nuage de points 3D, afin d’obtenir une représentation numérique des goulets d’étranglement. « Chaque image est dotée d’un géotag indiquant la position actuelle du drone. Lors de la photogrammétrie, un logiciel analyse les photos pour identifier des caractéristiques ou des points communs. En comparant ces points à travers les différentes images, le logiciel peut déterminer la position géographique dans l’espace 3D », explique Degen.
Comme méthode comparative, les chercheurs de la TH Köln développent un système de cartographie mobile qui est fixé sur le toit d’un véhicule. Chaque point de mesure, capturé par un scanner laser, se voit attribuer une position géographique par satellite. Ensuite, les données géographiques sont fusionnées en un nuage de points 3D. « De plus, nous montons une caméra sur le système de mesure et superposons les images capturées dans notre logiciel sur le nuage de points, qui est ensuite coloré en fonction de l’environnement. Cela permet de créer des cartes modèles 3D qui facilitent la vérification visuelle des prises de vue par les utilisateurs », explique le responsable du projet.
Planification des itinéraires et vérification des collisions
En plus des données environnementales, des informations sur la géométrie de l’équipement lourd à transporter sont intégrées dans un algorithme pour entraîner une intelligence artificielle. « L’algorithme a pour tâche de trouver un itinéraire avec le risque de collision le plus faible possible. En cas de goulet d’étranglement, par exemple, le contact de la charge avec des buissons ou des arbustes est considéré comme moins grave, tandis que le contact avec un pont ou un mur de maison est perçu comme un événement potentiellement grave. Ensuite, nous vérifions avec quelle base de données des deux méthodes l’analyse peut être réalisée de manière plus fiable et plus simple », déclare Degen.
Pour garantir le lien pratique du projet, un groupe de travail de recherche est constitué d’entreprises, d’autorités et d’associations. Grâce à un échange continu avec les partenaires, il est veillé à ce que le traitement des données prototypiques et la simulation de la praticabilité soient acceptés par les utilisateurs potentiels tels que les entreprises de transport, les planificateurs, les autorités de délivrance des permis ainsi que par les instances de délivrance des permis.
L’étude de faisabilité doit servir de base à des recherches approfondies dans ce domaine. De plus, il est prévu de valider les résultats dans un projet ultérieur et de les transférer au développement d’un produit commercialisable.
À propos du projet
Le projet « pointCloud2Model » est réalisé au CAD CAM Center Cologne de la TH Köln, dirigé par le Prof. Dr. rer. nat. Dr. h.c. Margot Ruschitzka. Le Dr. René Degen assume la direction du projet. Le groupe de travail de recherche comprend le Verband Bundesverband Schwertransporte et Kranarbeiten e.V., l’Office des transports de l’État de Rhénanie-Palatinat, le fournisseur de capteurs IGI mbH ainsi que l’entreprise de transport BigMove AG. Ce projet d’un an est financé à hauteur de 200 000 euros par le biais de la directive de financement « mFUND » du ministère fédéral des Transports et du Numérique.
Photo : © CAD CAM Center Cologne


{kind=link}