

Ports de NRW avec des volumes de manutention élevés en 2021
17/02/2022 à 16 h 56
À partir de fin mars, Lufthansa Cargo ne volera plus qu’avec l’eAWB
17/02/2022 à 18 h 29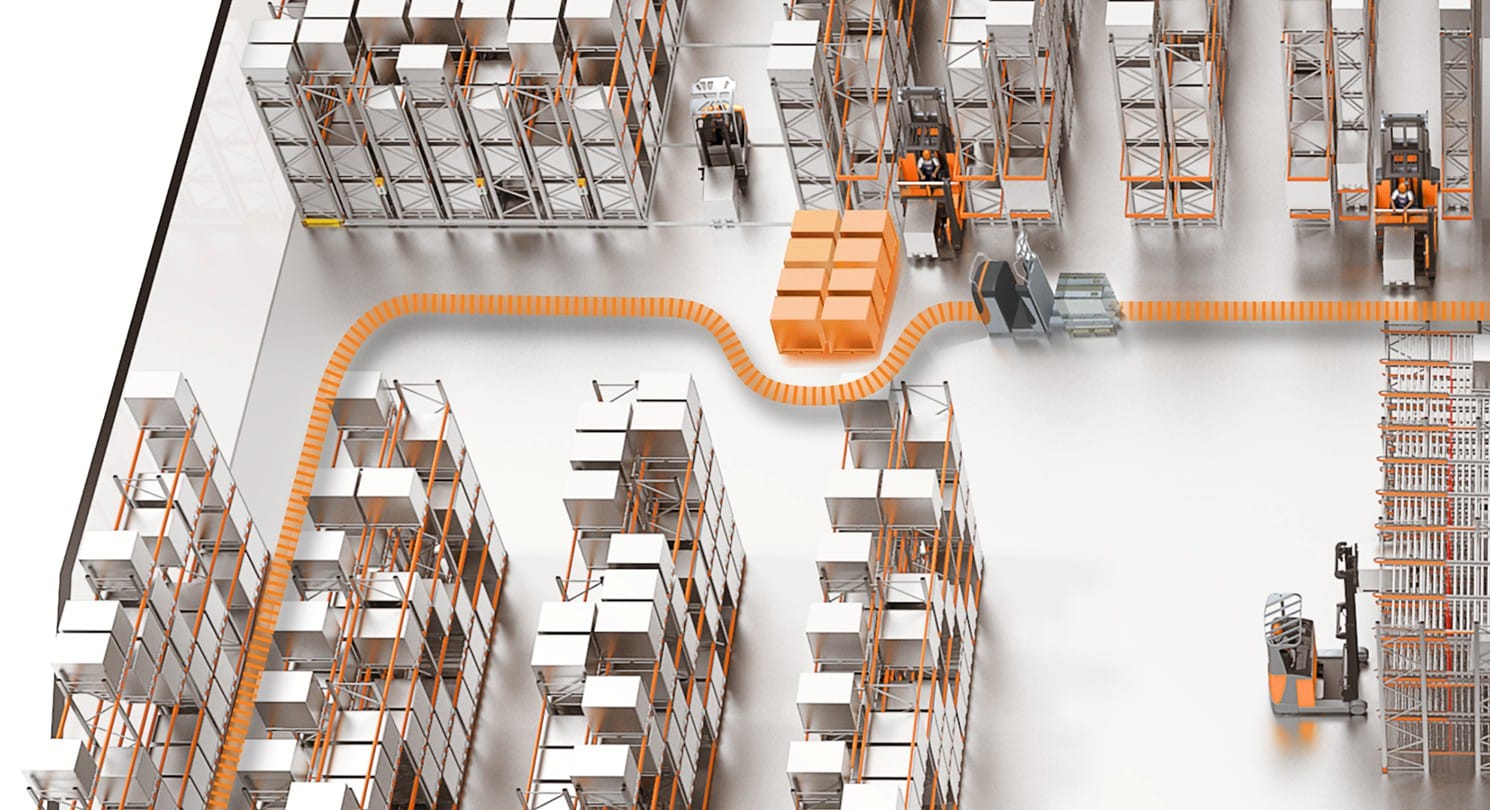
La vision des véhicules de transport autonomes dans les halls de production et les entrepôts devrait se rapprocher grâce au projet de recherche européen IMOCO (Intelligent Motion Control). Du côté allemand, le projet est dirigé par STILL, spécialiste de l’intralogistique basé à Hambourg et filiale du groupe KION. La fin du projet est prévue pour le quatrième trimestre 2024.
(Hambourg) La vision des véhicules de transport autonomes dans les halls de production et les entrepôts devrait se rapprocher grâce au projet de recherche européen IMOCO.
Des véhicules de transport qui naviguent complètement de manière autonome à travers les entrepôts et la production, analysent leur environnement et apprennent à « comprendre », reconnaissent et évitent de manière fiable les obstacles et les personnes tout en transportant rapidement et de manière fiable des marchandises d’un endroit à un autre - cela semble encore relever de la science-fiction. Cependant, cette vision devrait bientôt devenir réalité, selon les initiateurs du projet de recherche européen IMOCO.
Pour cela, quatre scénarios ont été définis dans le cadre du projet de recherche, caractérisés par des jumeaux numériques et des principes d’IA (apprentissage automatique / apprentissage profond) : la navigation intelligente, la prise de marchandises, le transport et le placement à destination. « De tels processus imposent des exigences très élevées aux processus et également au véhicule. Nous avons donc envoyé notre OPX iGo neo dans le projet, qui, grâce à son équipement intelligent et aux capacités qui en découlent, se rapproche déjà de la conception de ce véhicule autonome », décrit Ansgar Bergmann, responsable du projet IMOCO chez STILL.
Une sensorique hautement sensible est nécessaire
Les systèmes de transport sans conducteur actuels atteignent encore leurs limites lorsqu’il s’agit de se déplacer réellement de manière totalement autonome dans l’entrepôt ou dans la production. Bien qu’ils reconnaissent les obstacles et freinent de manière autonome, ils ne peuvent pas encore contourner les obstacles, rechercher intelligemment les itinéraires de conduite les plus efficaces et analyser l’environnement. Pour cela, ils ont besoin d’une sensorique hautement sensible sous forme de scanners laser, de caméras ou de radars, afin de détecter des objets spatiaux tels que des étagères ou des panneaux, des marquages et des affichages. De plus, ils doivent « comprendre » leur environnement, enregistrer les changements et être capables de s’y adapter. Ce n’est qu’ainsi que ces véhicules pourront naviguer de manière autonome vers leur point de destination, reconnaître et manipuler des charges, éviter des obstacles ou trouver des emplacements appropriés pour les marchandises transportées.
Augmenter les capacités autonomes
L’OPX iGo neo est déjà autonome dans les allées des étagères, il perçoit et comprend son environnement et en tire ses actions. Cependant, quitter l’allée des étagères de manière totalement autonome et naviguer dans les halls chez le client, par exemple en planifiant des chemins optimaux, n’est pas encore une fonctionnalité du produit. Cependant, comme il est déjà équipé d’une sensorique environnementale appropriée, cela en fait un point de départ idéal pour les développements futurs de ce projet. « Pour l’OPX iGo neo, l’objectif du projet est d’augmenter le degré de compréhension de l’environnement et les capacités de prise de décision, afin d’améliorer continuellement les capacités autonomes et l’intelligence du robot, et de lui permettre d’agir de manière autonome au-delà de l’allée des étagères. Les approches d’apprentissage automatique et d’apprentissage profond jouent un rôle très important », explique Ansgar Bergmann.
Reconnaître les obstacles en temps réel
IMOCO vise à créer les conditions nécessaires pour l’utilisation exigeante de systèmes robotiques mobiles dans des environnements intralogistiques dynamiques. Des modifications de planification de trajet effectuées de manière autonome et en fonction de la situation, y compris la prise en compte d’objets mobiles tels que des personnes ou des véhicules, devraient alors être possibles dans l’ensemble de l’entrepôt. Ansgar Bergmann déclare à ce sujet : « Le projet de recherche souhaite faire évoluer le traditionnel trio de reconnaissance, d’analyse et d’action grâce à l’intelligence artificielle - vers perception, compréhension et résolution. » Les véhicules devraient être capables, dans le cadre du projet de recherche, de percevoir l’environnement spatial à l’aide de différentes capteurs et de non seulement reconnaître des objets entraînés, mais aussi d’évaluer leurs mouvements. « Cette reconnaissance des obstacles doit se faire en temps réel pour un déroulement fluide », explique l’expert.
Hambourg devient un « centre de recherche »
Un démonstrateur sera construit au siège de STILL à Hambourg, où tous les succès de travail des partenaires du projet seront réunis. En plus de STILL en tant que représentant du groupe KION, le projet implique également en Allemagne l’Institut Fraunhofer pour le flux de matériaux et la logistique (IML), Hahn Schickard, IMST GmbH, Nuromedia et Digital Twin Technology. Le projet IMOCO est financé par l’Union européenne par le biais de l’organisme de recherche « Composants électroniques et systèmes pour le leadership européen » (ECSEL) ainsi que par le ministère fédéral de l’Éducation et de la Recherche.
Photo : © STILL


{kind=link}
{kind=link}